Defining new acquisition functions¶
Joachim van der Herten
Introduction¶
GPflowOpt implements supports some acquisition functions for common
scenarios, such as EI and PoF. However, it is straightforward to
implement your own strategy. For most strategies, it is sufficient to
implement the Acquisition interface. In case a more sophisticated
model is needed, this can easily be achieved with GPflow.
In [1]:
%matplotlib inline
import numpy as np
import matplotlib.pyplot as plt
import copy
import gpflow
import gpflowopt
import tensorflow as tf
In [2]:
rng = np.random.RandomState(5)
def camelback(X):
f = (4. - 2.1*X[:,0]**2 + 0.3* X[:,0]**4) * X[:,0]**2 + np.prod(X,axis=1) + 4 * (X[:,1]**2-1) * X[:,1]**2
return f[:,None] + rng.rand(X.shape[0], 1) * 0.25
# Setup input domain
domain = gpflowopt.domain.ContinuousParameter('x1', -3, 3) + \
gpflowopt.domain.ContinuousParameter('x2', -2, 2)
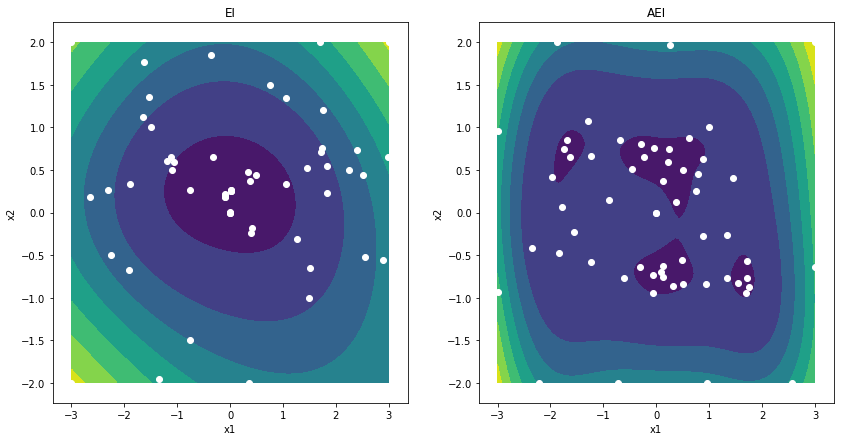
Augmented expected improvement¶
As an example on how to implement a custom acquisition function, we illustrate the Augmented EI (Huang et al. 2006), a modification for Expected Improvement for optimization of noisy functions. It is defined as
This definition can be interpreted as rescaling of the EI score, with respect to the noise variance. For \(\sigma^2_n=0\), the rescale term equals 1 and normal EI is recovered. For \(\sigma^2_n > 0\), small prediction variances are punished, which decreases concentration of sampling and enhances exploration.
To implement this acquisition function, we could override the
build_acquisition method of Acquisition, however in this case
its easier to override ExpectedImprovement and obtain the EI score
through a call to build_acquisition of the parent class.
In [3]:
class AugmentedEI(gpflowopt.acquisition.ExpectedImprovement):
def __init__(self, model):
super(AugmentedEI, self).__init__(model)
def build_acquisition(self, Xcand):
ei = super(AugmentedEI, self).build_acquisition(Xcand)
X = self.models[0].input_transform.build_forward(Xcand)
_, pvar = self.models[0].wrapped.build_predict(X)
return tf.multiply(ei, 1 - tf.sqrt(self.models[0].likelihood.variance)
/ (tf.sqrt(pvar + self.models[0].likelihood.variance)))
Results¶
This small experiment on the six hump camelback illustrates impact of the penalty term.
In [4]:
design = gpflowopt.design.LatinHyperCube(9, domain)
X = design.generate()
Y = camelback(X)
m = gpflow.gpr.GPR(X, Y, gpflow.kernels.Matern52(2, ARD=True, lengthscales=[10,10], variance=10000))
m.likelihood.variance = 1
m.likelihood.variance.fixed = True
ei = gpflowopt.acquisition.ExpectedImprovement(m)
m = gpflow.gpr.GPR(X, Y, gpflow.kernels.Matern52(2, ARD=True, lengthscales=[10,10], variance=10000))
m.likelihood.variance = 1
m.likelihood.variance.fixed = False
aei = AugmentedEI(m)
opt = gpflowopt.optim.StagedOptimizer([gpflowopt.optim.MCOptimizer(domain, 200),
gpflowopt.optim.SciPyOptimizer(domain)])
bopt1 = gpflowopt.BayesianOptimizer(domain, ei, optimizer=opt)
with bopt1.silent():
bopt1.optimize(camelback, n_iter=50)
bopt2 = gpflowopt.BayesianOptimizer(domain, aei, optimizer=opt)
with bopt2.silent():
bopt2.optimize(camelback, n_iter=50)
f, axes = plt.subplots(1,2, figsize=(14,7))
Xeval = gpflowopt.design.FactorialDesign(101, domain).generate()
Yeval = camelback(Xeval)
titles = ['EI', 'AEI']
shape = (101, 101)
for ax, t, acq in zip(axes, titles, [ei, aei]):
pred = acq.models[0].predict_f(Xeval)[0]
ax.contourf(Xeval[:,0].reshape(shape), Xeval[:,1].reshape(shape),
pred.reshape(shape))
ax.set_xlabel('x1')
ax.set_ylabel('x2')
ax.set_title(t)
ax.scatter(acq.data[0][:,0], acq.data[0][:,1], c='w')